Terrain Following
Executive Summary
Terrain Following allows a vehicle to maintain a constant height above the ground rather than above the takeoff point (Home). This is critical for low-level mapping or flying in mountainous regions.
ArduPilot manages this via the AP_Terrain library, which handles fetching, caching, and interpolating SRTM (Shuttle Radar Topography Mission) data.
Theory & Concepts
1. SRTM Grids
Terrain data is split into Grids.
- Grid Point: A single altitude value (int16, meters).
- Grid Spacing: The distance between points (default 100m, controlled by
TERRAIN_SPACING). - Block: A 2kB structure stored on the SD card containing an 8x7 array of 4x4 micro-grids.
2. Bilinear Interpolation
The vehicle is rarely exactly on top of a grid point. To find the height at the vehicle's location ($x, y$), AP_Terrain uses bilinear interpolation between the four surrounding grid points.
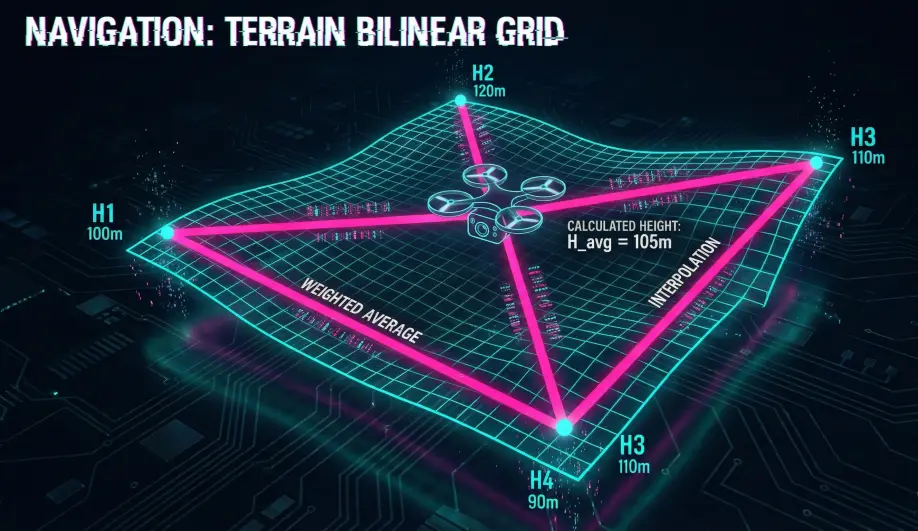
$$ h(x,y) \approx \frac{1}{(x_2-x_1)(y_2-y_1)} (h_{11}(x_2-x)(y_2-y) + h_{21}(x-x_1)(y_2-y) + \dots) $$
This ensures the ground "slope" is continuous and the drone doesn't "step" up and down as it crosses grid lines.
3. Lookahead
For fixed-wing aircraft, knowing the height now isn't enough. You need to know if there is a mountain ahead. AP_Terrain::lookahead() projects a line along the current bearing to calculate the "climb rate" needed to clear upcoming obstacles.
Codebase Investigation
1. The Cache System: AP_Terrain::allocate()
Located in libraries/AP_Terrain/AP_Terrain.cpp.
- The system allocates a memory cache (LRU - Least Recently Used) of 12 blocks (
TERRAIN_CACHE_SZ). - It serves data from RAM if possible. If not, it schedules a background Disk I/O task (
schedule_disk_io) to read from the SD card.
2. Height Calculation: height_amsl()
- Finds the correct grid block.
- Checks the
bitmapto ensure valid data exists for the 4 surrounding points. - Performs the bilinear interpolation:
float avg1 = (1.0f-info.frac_x) * h00 + info.frac_x * h10; float avg2 = (1.0f-info.frac_x) * h01 + info.frac_x * h11; float avg = (1.0f-info.frac_y) * avg1 + info.frac_y * avg2;
3. Failsafes
If the system cannot find data (e.g., SD card error or GCS disconnect):
- It returns
false. - The navigation controller (
AC_WPNav) will refuse to start a terrain-following mission or trigger a failsafe (RTL/Land) if already flying.
Source Code Reference
- Core Logic:
libraries/AP_Terrain/AP_Terrain.cpp - Data Structures:
libraries/AP_Terrain/AP_Terrain.h
Practical Guide: Safe Terrain Following
1. Pre-Flight Validation
Never launch a terrain mission blindly.
- Check MAVLink Status: The GCS should show "Terrain: 100%".
- Check
TERRAIN_ENABLE: Must be 1. - SD Card: The
terrain/folder on the SD card can grow large. Ensure it's not full.
2. The TERRAIN_SPACING Trap
- Default: 100m.
- Problem: If you fly in a canyon that is 50m wide, a 100m grid might completely miss the walls!
- Solution: For complex terrain, set
TERRAIN_SPACINGto 30 (meters). Note: This increases download time and SD card usage significantly.
3. "Terrain Failsafe"
What happens if the drone flies off the edge of your downloaded map?
- Behavior: It stops and hovers (Copter) or circles (Plane).
- Recovery: Switch to AltHold or Stabilize immediately. The auto-mission is stuck until data arrives.