Navigation Architecture
Executive Summary
Navigation in ArduPilot is not a monolithic block; it is a layered architecture separating Mission Management (high-level intent) from Position Control (kinematic execution) and Attitude Control (stabilization).
This separation allows AP_Mission to remain vehicle-agnostic, simply feeding "Target Locations" to vehicle-specific libraries (AC_WPNav for Copter, AP_L1_Control for Plane).
Theory & Concepts
The Control Loop Hierarchy
The autopilot operates on a cascaded control loop architecture, where slower outer loops drive faster inner loops.
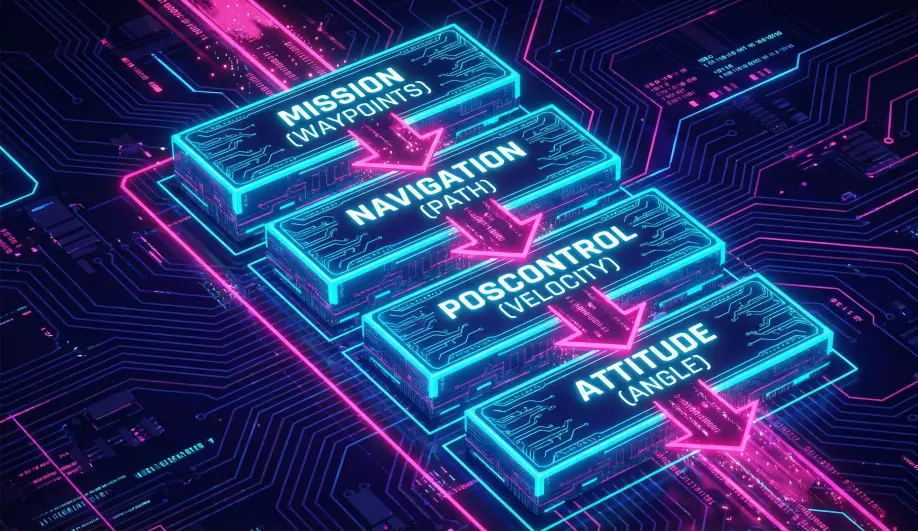
- Mission Layer (10Hz):
AP_Missiondetermines the active command (e.g., "Fly to Waypoint 4"). It monitors completion criteria (distance, altitude, time) and advances the index. - Navigation Layer (50Hz):
- Copter:
AC_WPNavgenerates a kinematic path (Spline or Straight Line) to the target. It outputs a Desired Velocity Vector and Position Target. - Plane:
AP_L1_Controlcalculates a Lateral Acceleration to minimize cross-track error (L1 Guidance).
- Copter:
- Position/Velocity Layer (50Hz - 400Hz): Converts Desired Velocity/Acceleration into Desired Lean Angles (Copter) or Control Surface Deflections (Plane).
- Attitude Layer (400Hz+): The Rate Controller drives the motors/servos to achieve the Desired Lean Angles.
Reference Frames
- NEU (North-East-Up): The standard internal frame for navigation relative to the EKF Origin (Home).
- Body Frame: X-forward, Y-right, Z-down. Used for sensor data and low-level control.
- Terrain Frame: Altitude relative to the loaded terrain database or rangefinder.
Codebase Investigation
1. The Mission Director: AP_Mission::update()
Located in libraries/AP_Mission/AP_Mission.cpp, this function is the heartbeat of autonomous operations.
- Logic:
- Checks
verify_command(_nav_cmd)to see if the current objective is met. - If
true, it callsadvance_current_nav_cmd()to load the next instruction. - It also manages "Do Commands" (servos, relays) which run concurrently with navigation.
- Checks
2. Vehicle Implementation: Copter vs. Plane
Copter (ArduCopter/mode_auto.cpp)
When ModeAuto::run() executes:
- It calls
wp_nav->update_wpnav(). - This moves the "Leash" (Target Position) towards the destination.
- The Position Controller (
pos_control->update_z_controller()) pulls the drone towards the Leash.
Plane (ArduPlane/mode_auto.cpp)
Plane uses a different strategy based on fluid dynamics:
- It calculates
nav_roll_cd(Commanded Centi-Degrees Roll) using L1 logic to track the line between waypoints. - It calculates
nav_pitch_cdandthrottleusing TECS (Total Energy Control System) to manage Speed and Height simultaneously.
Source Code Reference
- Mission Logic:
libraries/AP_Mission/AP_Mission.cpp - Copter Auto:
ArduCopter/mode_auto.cpp - Plane Auto:
ArduPlane/mode_auto.cpp
Practical Guide: Monitoring Mission Status
Operators often need to know why a drone is pausing or what it is waiting for.
1. MAVLink Messages
Monitor MISSION_CURRENT (Msg ID 42).
seq: The index of the active command.- If
seqstops incrementing, the drone is executing that command.
2. Common "Stuck" Scenarios
- Takeoff Wait: If the drone arms but doesn't spin up in Auto, check
MIS_OPTIONS. Some configurations wait for a "Mission Start" MAVLink command. - Altitude Wait: If
verify_nav_wpnever completes, check your Altitude Acceptance Radius (WPNAV_RADIUSorWP_RADIUS). If the drone cannot reach the exact Z-altitude due to baro drift or max throttle, it will circle indefinitely.
3. Debugging with Logs
Open the DataFlash log and look for CMD messages.
- CTot: Command Total.
- CNum: Current Command Number.
- CId: Command ID (e.g., 16 = Waypoint, 22 = Takeoff).
- Tip: If
CNumchanges but the drone behaves oddly, check theP1(Parameter 1) field. For Loiter commands, this is often the "Time" or "Turns" which might be set incorrectly to 0 (forever).