Dijkstra Path Planning
Executive Summary
While BendyRuler is great for local, reactive avoidance, it can get stuck in "cul-de-sacs" (U-shaped obstacles). Dijkstra's Algorithm solves this by building a global map of the known fence and finding the mathematically optimal path around it.
It is computationally expensive but guarantees a solution if one exists within the fence boundaries.
Theory & Concepts
1. The Visibility Graph
To use Dijkstra on a continuous 2D plane, ArduPilot discretizes the world into a Visibility Graph.
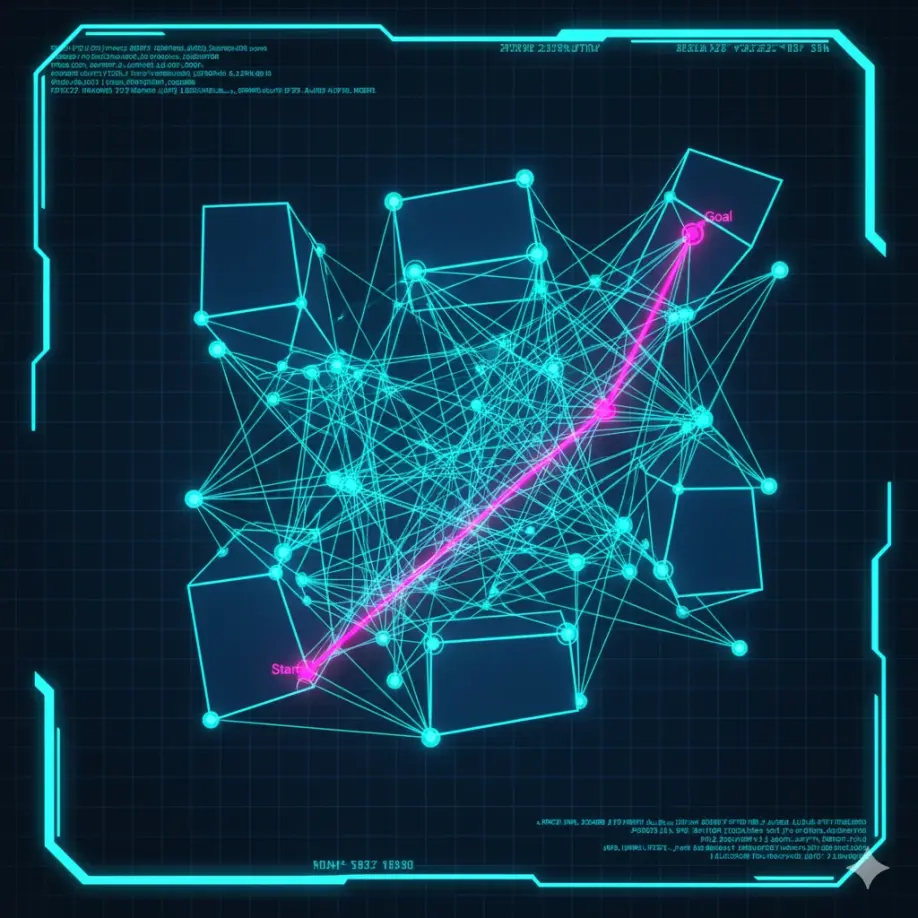
- Nodes: The vertices of all Inclusion and Exclusion polygons (plus a safety margin).
- Edges: A line connects two nodes if the path between them does not intersect any fence line.
- Logic: The drone can fly safely along any edge in the graph.
2. The Shortest Path
Dijkstra's algorithm explores the graph starting from the vehicle's position (Source).
- Assign tentative distance values to every node (0 for Source, Infinity for others).
- Visit the unvisited node with the smallest tentative distance.
- Calculate distances to its neighbors.
- Repeat until the
Destinationnode is visited.
Codebase Investigation
1. Building the Graph: create_fence_visgraph()
Located in libraries/AC_Avoidance/AP_OADijkstra.cpp.
- It expands the user-defined fence polygons by OA_MARGIN_MAX.
- It iterates through every pair of points ($N^2$ complexity) to check for line-of-sight connectivity using
intersects_fence().
2. The Solver: calc_shortest_path()
Located in libraries/AC_Avoidance/AP_OADijkstra.cpp.
- Runs the standard Dijkstra loop.
- Output: A list of waypoints (
_shortest_path) that the vehicle must follow to clear the obstacle.
3. Dynamic Updates
Unlike a static map, the graph must be rebuilt if the destination changes or if the fence is updated via MAVLink. This is a heavy operation, often causing a momentary loop delay on slower processors (F4).
Source Code Reference
- Implementation:
libraries/AC_Avoidance/AP_OADijkstra.cpp - Header:
libraries/AC_Avoidance/AP_OADijkstra.h
Practical Guide: When to use Dijkstra?
1. Complex Geo-Fencing
If you have a complex Exclusion Zone (e.g., a "Keep Out" zone for a building) and you want the drone to fly around it automatically during a mission, Dijkstra is the only option. BendyRuler might just stop at the edge.
2. Performance Limits
- Point Limit: ArduPilot limits the total fence points to ~100 to keep calculation time reasonable.
- Hardware: Recommended only for H7 boards (Cube Orange, Matek H743). On F4 boards, expect sluggishness during path recalculation.
3. "Dijkstra Failed" Errors
If you see this error:
- Cause: The destination is inside an exclusion zone or outside an inclusion zone.
- Fix: Ensure your WP mission is valid relative to the fence before uploading. (
OA_TYPE= 2 enables Dijkstra).
How To: Setup Complex Geo-Fencing for Dijkstra
Dijkstra excels when you have "No Fly Zones" (NFZ) inside your mission area, like a building or a tree cluster.
1. Enable Dijkstra
OA_TYPE=2(Dijkstra).
2. Draw the Fence
- Open Mission Planner > Plan.
- Inclusion Zone: Draw a large Polygon Fence around the entire flight field. Right-click -> GeoFence -> Inclusion.
- Exclusion Zone: Draw a smaller polygon around the obstacle. Right-click -> GeoFence -> Exclusion.
- Upload: Click "Write GeoFence".
3. Plan a Mission
- Place Waypoint 1 on one side of the Exclusion Zone.
- Place Waypoint 2 on the opposite side.
- Do not place intermediate waypoints around the obstacle; Dijkstra will do that for you.
Result: When you switch to Auto, the drone will fly to WP1, then calculate a path around the Exclusion Zone (hugging the edge by OA_MARGIN_MAX) to reach WP2. You will see "OA: Path found" message on the HUD.