Total Energy Control System (TECS)
1. Core Physics: Energy Rate vs. Distribution
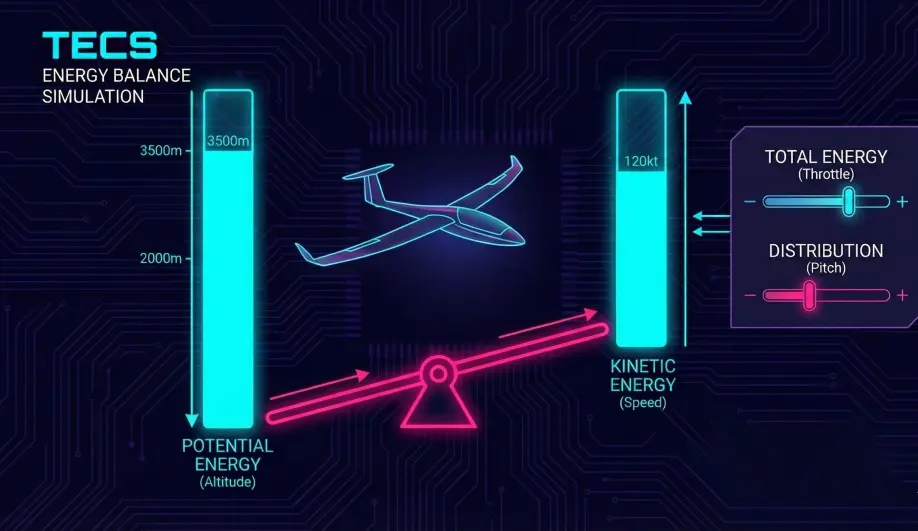
The Total Energy Control System (TECS) replaces classical independent altitude/airspeed PID loops with a physics-based MIMO (Multi-Input Multi-Output) controller. It manages the aircraft's energy state rather than just its spatial position.
The Energy State
An aircraft has two primary energy reservoirs:
- Gravitational Potential Energy ($E_P$): Function of Altitude ($mgh$).
- Translational Kinetic Energy ($E_K$): Function of Airspeed ($ \frac{1}{2}mV^2 $).
Control Objectives
TECS decouples control into two orthogonal loops:
-
Total Energy Rate ($\dot{E}_{total}$): Controlled by THROTTLE.
- Logic: If the plane is both too low (low $E_P$) and too slow (low $E_K$), it has a total energy deficit. Only adding thrust can solve this. Elevator input effectively just trades one error for another.
- Equation: $\dot{E}_{total} \propto \text{Thrust} - \text{Drag}$
-
Energy Distribution Rate ($\dot{E}_{dist}$): Controlled by PITCH.
- Logic: If the plane is high but slow, or low but fast, the Total Energy might be correct, but distributed wrongly. The elevator exchanges Potential for Kinetic energy (or vice versa).
- Equation: $\dot{E}_{dist} \propto \dot{h} - \frac{V\dot{V}}{g}$
2. ArduPilot Architecture (AP_TECS)
The AP_TECS library sits between the Navigation Controller (AP_L1_Control/Mission Planner) and the Attitude Controller (AP_AttitudeControl - Roll/Pitch PIDs).
- Inputs: Demanded Speed (
spdem), Demanded Height (hdem), State Estimates (EKF). - Processing: Calculates Specific Energy Error and Energy Distribution Error. Applies
TECS_TIME_CONSTfilters andSPDWEIGHTweighting. - Outputs: Target Pitch (
pitch_dem) $\rightarrow$ Inner Loop; Target Throttle (throttle_dem) $\rightarrow$ ESC.
CRITICAL ARCHITECTURAL CONSTRAINT: TECS assumes the inner pitch loop is perfect. If
ATT.PitchlagsATT.DesPitch, TECS receives delayed feedback on its energy distribution corrections, leading to divergent oscillation. Tune Inner Loops First.
3. Pre-Tuning Checklist
DO NOT attempt TECS tuning until these physical baselines are verified.
- Center of Gravity: Must be mechanically correct. Tail-heavy aircraft require rapid stabilizer corrections that TECS misinterprets as energy distribution volatility.
- Airspeed Sensor:
ARSPD_RATIOmust be calibrated (flight circle/figure-8).- Kinetic energy is proportional to $V^2$; sensor errors are amplified exponentially in the energy calculation.
- Inner Loops (Attitude):
- Run
AUTOTUNE. - Log Analysis: Verify
ATT.PitchtracksATT.DesPitchwith minimal latency (<200ms) and no oscillation.
- Run
4. Tuning Protocol
Tuning is a process of System Identification, not random gain adjustment. We fly to measure physical limits, then map those limits to parameters.
Phase 1: Flight Envelope Identification (Manual/FBWA)
Fly in FBWA mode to manually probe limits.
| Maneuver | Action | Observation | Parameter Mapping |
|---|---|---|---|
| Cruise Trim | Fly level at cruise speed. | Record Throttle % and Pitch Angle. | TRIM_THROTTLE |
| Max Climb | Full Throttle (THR_MAX), pull back to max safe climb angle. |
Record stabilized Climb Rate (m/s). | TECS_CLMB_MAX (Set to ~80-90% of measured) |
| Min Sink | Idle Throttle (THR_MIN), glide level. |
Record Sink Rate (m/s). | TECS_SINK_MIN |
| Max Sink | Idle Throttle, pitch down to max safe descent. | Record Sink Rate (m/s). | TECS_SINK_MAX |
Phase 2: Bench Configuration
Apply observed values to parameters.
TECS_CLMB_MAX: Set to 80-90% of observed max climb. Warning: Setting this to 100% causes integrator windup as the target is mathematically impossible.AIRSPEED_MIN: Stall speed + 20% safety margin.AIRSPEED_MAX: Slightly below structural $V_{ne}$.
Phase 3: Verification (Autonomous)
Switch to LOITER or CRUISE.
- Loiter Stability: Verify Altitude $\pm 1m$, Speed $\pm 1m/s$.
- Climb Step: Command +50m alt change. Throttle should smoothly surge to
THR_MAX. - Descent Step: Command -50m alt change. Throttle should cut to
THR_MIN; Pitch should drop to maintain airspeed.
5. Advanced Parameter Tuning
Once the envelope is defined, tune the "personality" of the controller. (See Parameter Definitions in source).
5.1 TECS_SPDWEIGHT (Priority)
Determines how the controller resolves conflict (e.g., Underspeed AND Low Altitude).
- Range: 0.0 - 2.0 (Default: 1.0)
- 1.0 (Balanced): Splits error correction between Speed and Height.
- 2.0 (Speed Priority): Mandatory for Gliders. Sacrifices altitude to maintain airspeed (prevent stall).
- 0.0 (Height Priority): Sacrifices speed to maintain altitude (Precision Landing).
5.2 TECS_TIME_CONST (Aggressiveness)
Low-pass filter time constant on energy errors.
- Default: 5.0
- Tuning:
- Porpoising (Sinusoidal oscillation): Increase to 7.0 or 8.0 to dampen response.
- Sluggishness: Decrease to 3.0 or 4.0 for tighter tracking (requires fast inner loops).
5.3 THR_SLEWRATE (Throttle Smoothness)
Max % throttle change per second.
- Electric: 100% (Instant).
- Gas/Nitro: 20-30% to prevent engine choke on rapid transients.
- Surging: Reduce to dampen "throttle hunting" in gusty conditions.
5.4 TECS_PTCH_FF_K (Feed-Forward)
Predicts pitch change needed for a speed change.
- Value: -0.04 to -0.08.
- Use Case: High-efficiency gliders. improves responsiveness to speed demands without waiting for error integration.
6. Forensics & Log Analysis
Diagnosis of common energy pathologies using Dataflash logs.
6.1 Porpoising (Height Oscillation)
- Symptom: Aircraft undulates sinusoidally.
- Log:
TECS.hoscillates aroundTECS.hdem. - Root Cause 1: Inner Loop Lag. Check
ATT.PitchvsATT.DesPitch. $\rightarrow$ Tune Pitch PID. - Root Cause 2: TECS too fast. $\rightarrow$ Increase
TECS_TIME_CONST(+1.0 steps). - Root Cause 3: Damping. $\rightarrow$ Increase
TECS_PTCH_DAMP(+0.1 steps).
6.2 Throttle Hunting (Surging)
- Symptom: Motors rev up/down in level flight.
- Log:
TECS.thshows sawtooth/square wave. - Fix 1: Decrease
THR_SLEWRATE. - Fix 2: Increase
TECS_THR_DAMP. - Fix 3: Verify
TRIM_THROTTLEmatches actual cruise throttle.
6.3 Altitude Loss in Turns
- Symptom: Drops altitude when banking.
- Physics: Banking diverts lift vector; vertical component decreases.
- Fix: Increase
TECS_RLL2THR. Adds feed-forward throttle based on bank angle to overcome induced drag.
7. Special Configurations
QuadPlanes (VTOL)
- Transition: TECS does not fully own altitude control until transition is complete.
Q_ASSIST_SPEED: Set this belowAIRSPEED_MINto prevent VTOL motors firing during normal fixed-wing energy maneuvers (which confuses TECS).
Gliders
THR_MAX= 0 (or climb only).TECS_SPDWEIGHT= 2.0 (Must prioritize speed/stall prevention).SOAR_ENABLE: Use ArduPilot Soaring features to treat thermals as lift sources rather than altitude errors.